Entscheidungen in einer datengesteuerten Welt

Stellen Sie sich vor, Sie müssten auf dem Weg zur Arbeit nicht mehr durch den Berufsverkehr fahren. Sich von Baustellen nicht mehr die Urlaubsreise vermiesen lassen, und sich nicht länger mir fürchterlichen Verkehrsteilnehmern herumschlagen. Stattdessen könnten Sie entspannt im fliegenden Taxi Emails beantworten oder sich im selbstfahrenden Familienauto Ihren Liebsten widmen. Und all das, ohne sich an Fahrpläne öffentlicher Verkehrsmittel halten zu müssen. Klingt nach Science-Fiction?
Bald schon könnte dies aber Realität werden.
Vorsicht ist besser als Nachsicht
Künstliche Intelligenz (KI) verspricht seit langem, diese Vision mithilfe von cleveren Algorithmen, Supercomputern und den riesigen Datenmengen, die uns heute zur Verfügung stehen, zu verwirklichen. Doch warum sind wir noch nicht so weit? In einem Wort: Sicherheit. Sie würden nicht in ein Auto steigen dessen Sicherheit Sie anzweifeln.
Obwohl selbst heutige automatisierte Systeme bei bestimmten Aufgaben bereits mit dem Menschen mithalten oder sie sogar übertreffen können, kann es immer noch zu Fehlern kommen. Manchmal mit katastrophalen Folgen, wie zum etwa im Falle von Tesla-Fahrzeugen. Dabei ist die Ursache solcher Fehler für Ingeneurinnen und Ingeneure nicht immer nachvollziehbar.
Bei der Entwicklung autonomer Systeme kommt es entscheidend auf Modelle an. Denken Sie etwa an Autopilotsysteme: Deren Entwicklung hängt von der genauen Modellierung der Funktionsweise eines Flugzeugs ab.
Modelle sind unverzichtbar für die Entwicklung und den Bau von Flugzeugen, die Ausbildung von Pilotinnen und Piloten in Simulatoren sowie für die Minimierung der Betriebskosten, wie etwa durch die Verringerung des Kraftstoffverbrauchs. Sie sind auch wichtig, um verborgene (nicht gemessene), aber entscheidende Systemzustände abzuleiten — beispielsweise die Lage des Flugzeugs auf der Grundlage von Gyroskopen.
Modelle also so wichtig, weil sie es uns ermöglichen die Realität zu simulieren und künftige Massnahmen zu planen.
Zurück in die Zukunft
Die Fähigkeit, die Zukunft zu simulieren und darauf basierend zu handeln, ist der Kern der sogenannten Model Predictive Control (MPC), einem unglaublich leistungsfähigen Ansatz, den die Regelungstechnik hervorgebracht hat.
Einfach ausgedrückt, verwendet ein MPC-Algorithmus Modelle, die beschreiben, wie sich ein dynamisches System verhält (etwa das Flugverhalten eines Quadcopters), um damit die nahe Zukunft zu simulieren und Entscheidungen auf der Grundlage des Ergebnisses der Simulation zu treffen.
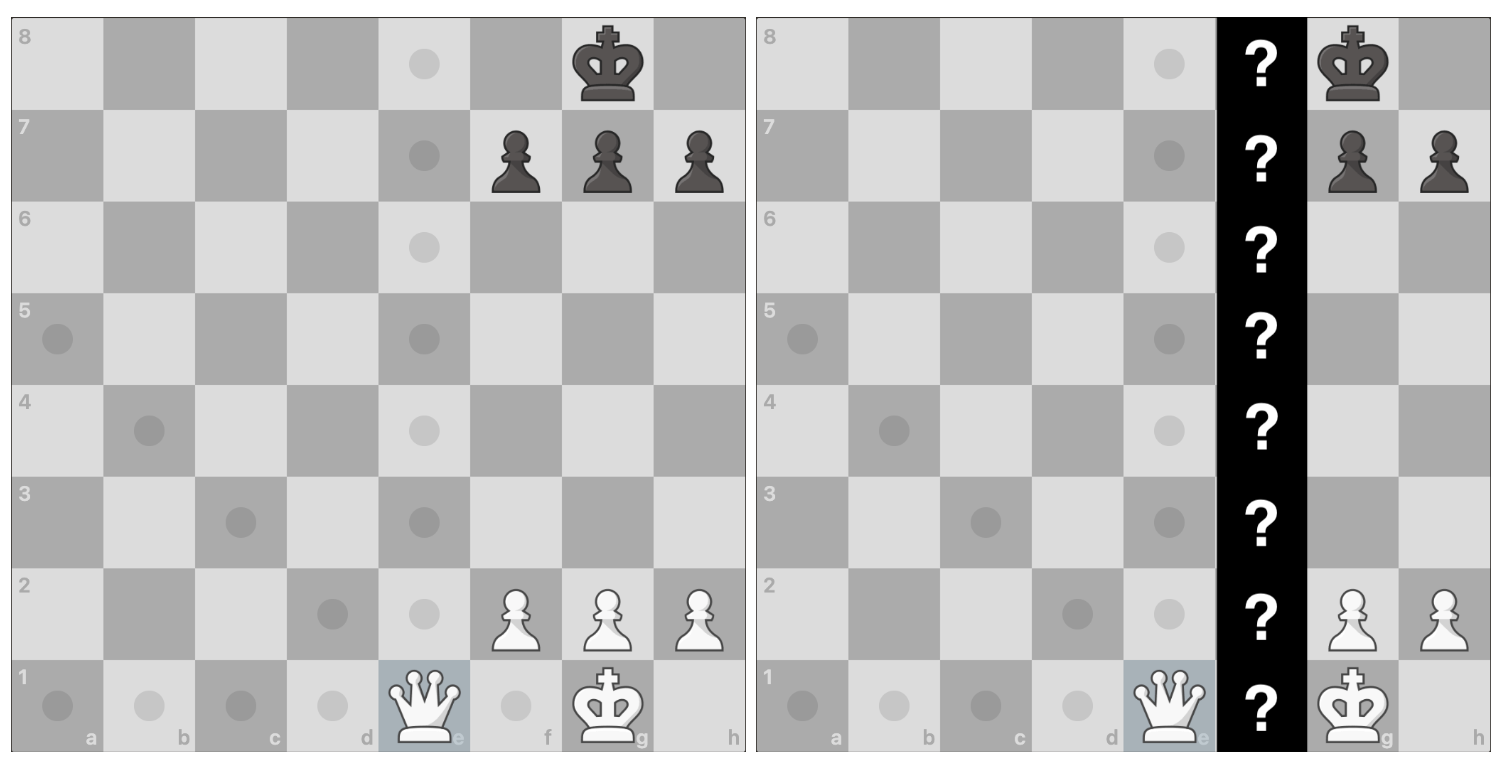
Denken Sie als Analogie an ein Schachspiel: Wenn Sie Ihre Dame bewegen wollen, können Sie nur auf bestimmte Weise ziehen. Um den bestmöglichen Zug zu wählen, gehen Sie mögliche zukünftige Züge mental durch. Sie erstellen also ein Schachmodell, simulieren damit die Zukunft Ihrer Partie und treffen darauf basierend eine Entscheidung.
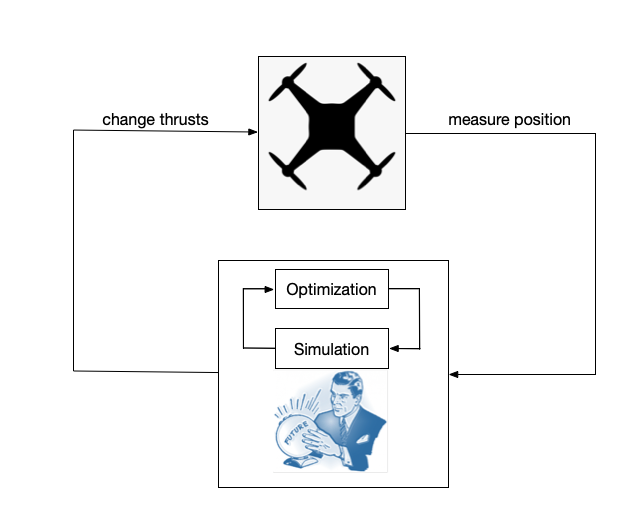
In ähnlicher Weise legt ein MPC-Algorithmus anhand einer Simulation der nahen Zukunft einen Plan fest und führt einen Schritt dieses Plans aus. Auf der Grundlage der Beobachtungen nach diesem Schritt geht der MPC-Algorithmus zurück zur Simulation und evaluiert neu: Ist der Plan noch der richtige? Oder gibt es für die neue Situationes allenfalls noch eine bessere Variante? Sprich: Ist eine Optimierung möglich?
Durch dieses Erfassen, Ausführen und Optimieren in Echtzeiterstellt schliesst der MPC-Algorithmus eine Rückkopplungsschleife zur Realität.

Es bleibt jedoch ein Vorbehalt: Je weiter das Modell in die Zukunft reicht, desto unzuverlässiger wird es. Denken Sie wieder an Schach: Sie können viele Züge voraus planen, doch wenn Sie zu weit vorausschauen, wird Ihr Gegner unweigerlich einen unerwarteten Zug machen. Klingt logisch, oder?
Die Rückkopplungsschleife ermöglicht es einem MPC-Algorithmus, die tatsächlichen Auswirkungen seiner Aktion mit dem zu verbinden, was er zuvor simuliert hatte. Auf diese Weise können Unstimmigkeiten zwischen dem Modell und der Realität sowie andere unerwartete Fehler korrigiert werden.
Der Tanz zwischen Simulation und Rückkopplung ermöglicht es den MPC-Algorithmen, erstaunliche Dinge zu tun. Doch natürlich gibt es nichts zum Nulltarif. Manchmal können MPC-Algorithmen kläglich versagen. Dies hängt oft von der Qualität der Modelle ab.
Denken Sie an einen komplexen humanoiden Roboter, dessen Ziel es ist, über Hindernisse zu laufen. Ein Modell für diese Aufgabe zu finden, ist sehr zeitaufwändig, teuer und hängt von Expertenwissen ab, das möglicherweise nicht vorhanden ist.
Diese Nachteile sind nicht nur bei dieser speziellen Aufgabe zu beobachten. Tatsächlich erfordert die Suche nach einem Modell fast immer eine grosse Menge an Daten sowie spezielle Algorithmen und Fachwissen.
Schwimmen in der Datenflut

Ein alternativer Ansatz besteht darin, dynamische Systemmodelle völlig zu umgehen und zu lernen, wie man Entscheidungen direkt aus Daten trifft. Dieser datengesteuerte Ansatz wird, angetrieben durch Fortschritte in Methoden des maschinellen Lernens, in vielen Anwendungsbereichen bevorzugt und verspricht aufregende Entwicklungen. Dazu gehören etwa das sogenannte Pixel-to-Control-Paradigma, das eine End-zu-End-Automatisierung beim autonomen Fahren ermöglicht.
Die Wahrheit ist jedoch, dass weder die Forschung im Bereich der KI- noch jene auf dem Gebiet der Regelungstechnik bisher weiss, wie man datengesteuerte Steuerungen entwirft, die in sicherheitskritischen- und Echtzeitumgebungen zuverlässig funktionieren.
Es scheint also, als befänden wir uns in einer Sackgasse. Wir wissen, wie wir Entscheidungen treffen können, wenn wir dynamische Systemmodelle haben. Doch solche Modelle sind manchmal schwer zu bekommen.
Umgekehrt ist es schwierig, Entscheidungen direkt auf der Grundlage von Daten zu treffen. Selbst für sehr einfache Aufgaben erfordert dies einen erheblichen Zeitaufwand und eine hohe Rechenleistung. Ein beträchtlicher weltweiter Forschungsschwerpunkt mit der Bezeichnung "datengesteuerte Steuerung" befasst sich daher mit solchen Fragen.
DeePC: Modellfreier MPC
Unsere Lösung für dieses Huhn-Ei-Problem ist einfach. Es überrascht vielleicht nicht, dass wir das Beste aus beiden Welten nutzen möchten. Dazu gehen wir folgendermassen vor: Die erste Idee besteht darin, dynamische Systemmodelle durch Rohdatenmatrizen aus gestapelten Zeitreihenmessungen zu ersetzen.
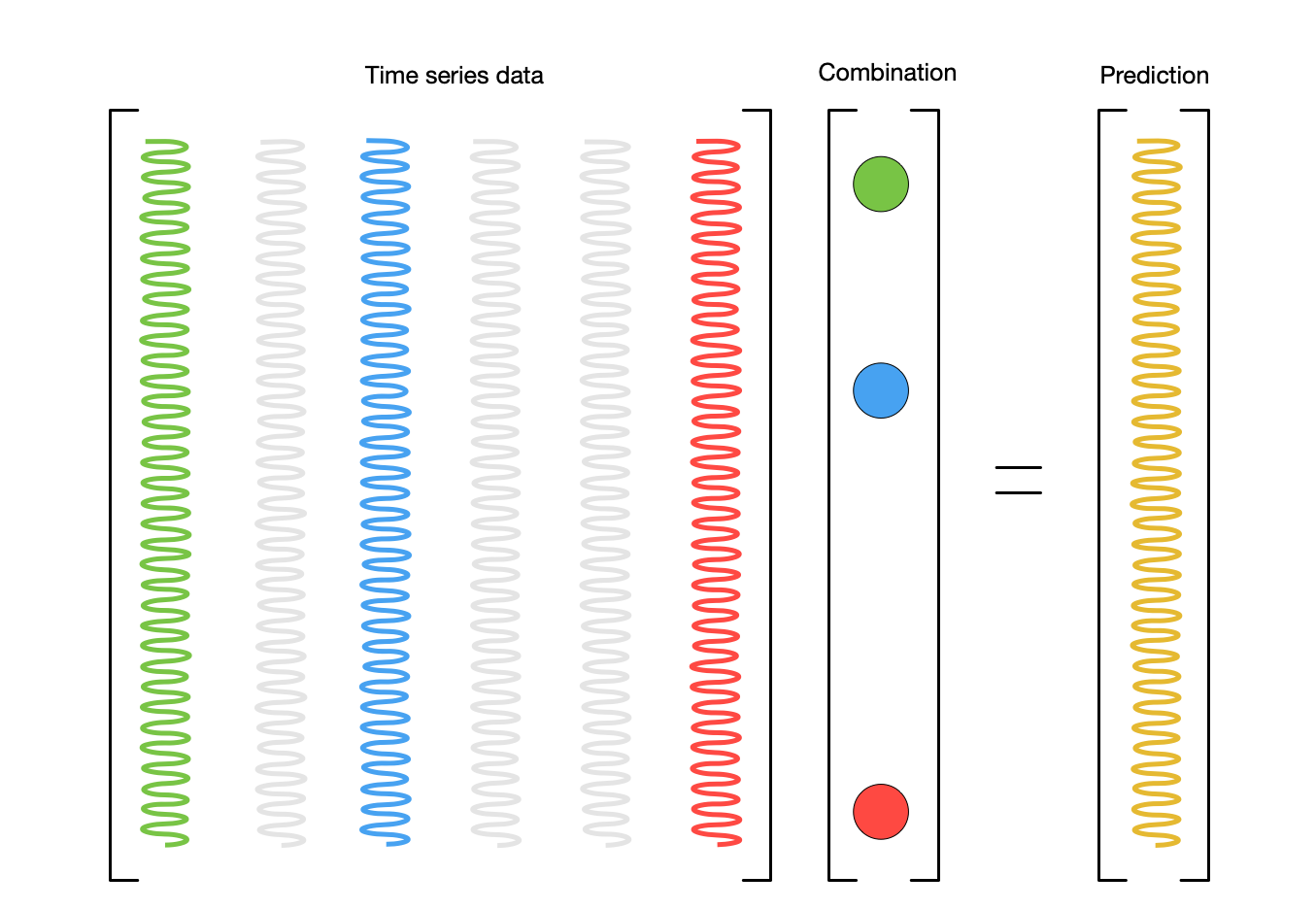
Die Spalten der Matrix stellen verschiedene gültige Verhaltensweisen dar. Solche gültige Verhaltensweisen könnten im Falle eines Quadcopters beispielsweise unterschiedliche Flugbahnen sein. Die Spalten der Datenmatrix werden also etwa durch das Messen der Position und Geschwindigkeit zu verschiedenen Zeitpunkten gebildet.
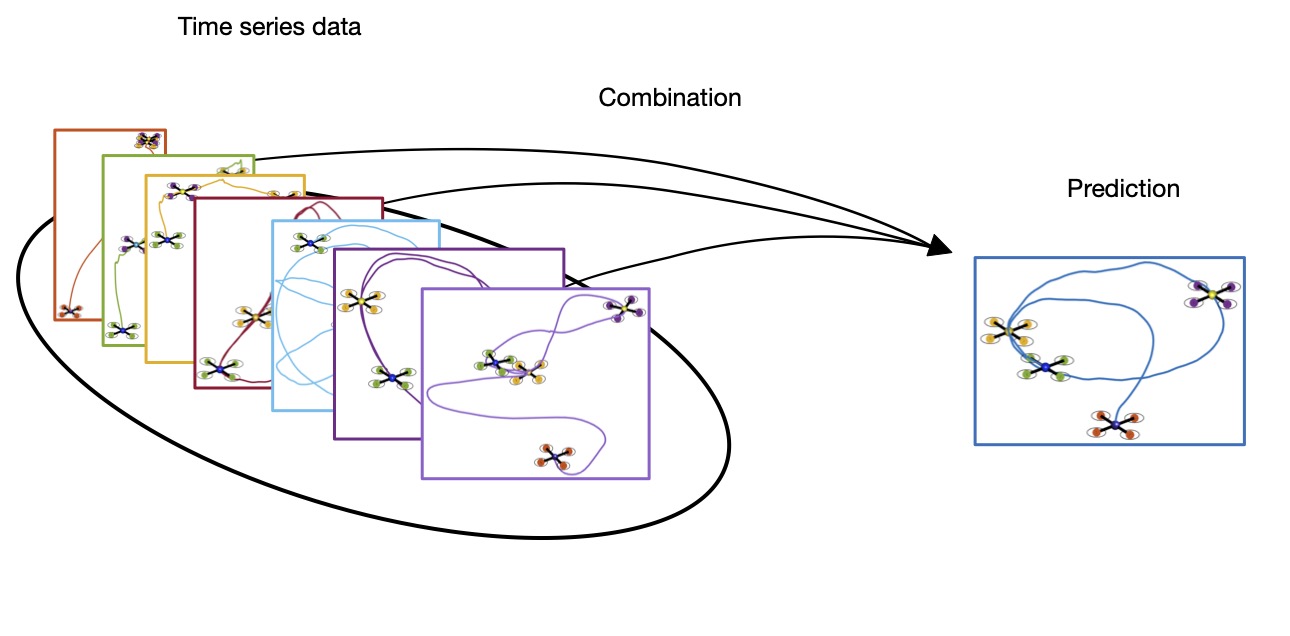
Unter vernünftigen Annahmen ist garantiert, dass jede Kombination der Spalten der Datenmatrix ein anderes gültiges Verhalten ergibt. Mit anderen Worten: Rohdatenmatrizen können als Vorhersagemodelle betrachtet werden.
Die zweite Idee besteht darin, ein simuliertes Verhalten in ein MPC-Schema einzuspeisen. Ähnlich wie oben beschrieben, aber mit rein datengesteuerten Vorhersagemodellen.
Fügt man all diese Teile zusammen, erhält man einen datengesteuerten MPC-Algorithmus, den wir Data-Enabled-Predictive-Control (DeePC) nennen. Unter vernünftigen Annahmen ist DeePC nicht nur garantiert genauso leistungsfähig wie herkömmliche MPC-Algorithmen, sondern bietet auch einige zusätzliche Vorteile. Man braucht nämlich kein Expertenwissen, das normalerweise erforderlich ist, um ein Modell zu finden. Jeder, der Zugang zu genügend Daten hat, verfügt bereits über ein kostenloses Modell — ohne dass er sich die Mühe machen muss! Und DeePC ist unglaublich einfach zu implementieren.
In den letzten Jahren haben wir DeePC entwickelt und seine Fähigkeiten in einer Reihe von Fallstudien getestet. Unter anderem an Energiesystemen, Quadcoptern, autonomen Schreitbaggern und im Verkehr. Hier sehen Sie, wie DeePC die Bewegung eines Quadcopters und sogar eines 12-Tonnen-Baggers steuert:
 |
 |
Auch wenn wir über diese vielversprechenden Ergebnisse sehr erfreut sind, ist unsere Arbeit noch nicht getan. Die Bewegung eines Quadcopters zu steuern ist etwas ganz anderes als Menschen mit einem autonomen Taxi herumzufliegen. Natürlich sind Qualität, Sicherheit und Zuverlässigkeit ein absolutes Muss; aber ist es möglich, solche Garantien zu geben, wenn die Umgebung unsicher oder sogar unbekannt ist? Um zu verstehen warum, denken Sie noch einmal an das Schachspiel: Die Wahl des besten Zuges ist möglicherweise nicht mehr einfach — gar oder möglich —, wenn ein Teil des Schachbretts unbekannt ist.
Natürlich können wir uns bei unserer Entscheidungsfindung nie zu 100 % sicher sein, wenn die Informationen unsicher sind. Doch manchmal müssen Entscheidungen auch unter ungünstigen Umständen getroffen werden. So können die Kameras eines autonomen Fahrzeugs Schwierigkeiten haben, ein Objekt (oder, schlimmer noch, eine Person) zu erkennen. Unsere Algorithmen müssen jedoch auch in solchen Situationen sichere und zuverlässige Entscheidungen in Echtzeit treffen.
Ein bisher ungelöstes Problem besteht daher darin, vernünftige Wege zur Quantifizierung der Unsicherheit zu finden, die für eine intelligente Entscheidungsfindung genutzt werden können. Unsere jüngste Forschungsarbeit ist ein erster Schritt in diese Richtung und baut auf dem oben beschriebenen datengesteuerten Ansatz auf.
Möchten Sie mehr über diesen Forschungszweig erfahren? Besuchen Sie unsere Webseiten (verlinkt hier, hier und hier) und bleiben Sie gespannt!



