Via Automation - un breve tour sul controllo automatico: Feedback


A prima vista, potrebbe sembrare strano parlare di controllo automatico durante un'escursione. La maggior parte di noi non ama forse le escursioni proprio per immergersi nella natura e allontanarsi dall'industrializzazione? Come abbiamo già visto nel post precedente, i nostri strumenti sono strettamente legati a strategie efficaci di conservazione dell'ambiente, ma forse, cosa ancora più importante e diretta, considerare i controlli e l'ottimizzazione come qualcosa che riguarda esclusivamente l'industria ci priva di molte delle cose divertenti e utili che facciamo.
In fin dei conti, chi si occupa di controllo automatico mira a comprendere i sistemi dinamici e il loro funzionamento a livello base. Questi sistemi possono essere industriali, ma non necessariamente. Il nostro obiettivo è comprendere in particolare come modificare il comportamento dinamico (ovvero i modelli di comportamento che si verificano all'interno di un sistema nel tempo), ad esempio per migliorare la precisione di una stampante 3D, stabilizzare agevolmente gli aerei in virata, riscaldare in modo efficiente le macchine da caffè e persino comprendere la regolazione del calcio nelle mucche. Che ci crediate o no, tutti gli esempi sopra citati (comprese le mucche) possono essere studiati utilizzando più o meno gli stessi strumenti e il tema generale qui è il feedback.

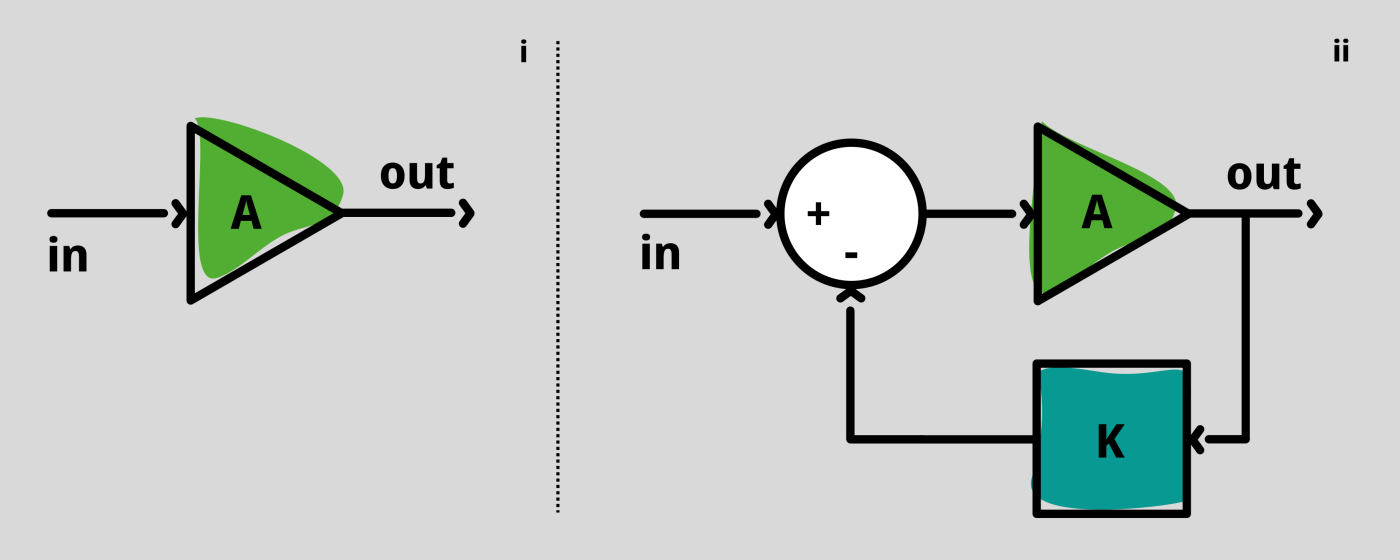
All'inizio del 1900, il concetto di feedback fece la sua comparsa nel campo delle telecomunicazioni. Più precisamente, sulle lunghe distanze, i segnali diventavano così deboli che le informazioni andavano perse, il che significava che gli ingegneri dovevano trovare un modo per amplificarli. Schematicamente e in modo semplificato, se abbiamo un input (in), l'output (out) sarebbe out = A*in, vedi figura 1(i). Pertanto, dobbiamo assicurarci che l'amplificazione (A) sia sufficientemente grande. Tuttavia, gli amplificatori dell'epoca non erano così affidabili, quindi non era possibile impostare un valore fisso per A. È come se si cercasse di guidare con l'acceleratore che funziona solo a volte.
Per risolvere questo problema, Harold Black, un ingegnere dei Bell Labs, ha ideato il feedback. Per la precisione, il feedback negativo. Per una rappresentazione schematica, vedere figura 1 (ii). In questo caso l'output segue l'equazione out=A/(1+A*K) *in. Quindi, se A è sufficientemente grande, indipendentemente dall'affidabilità, otteniamo che out è approssimativamente uguale a 1/K * in.
Nota: in questo caso puoi pensare a "in" più come a un "segnale di riferimento". Questi schemi sono stati implementati utilizzando componenti analogici e, sebbene gli amplificatori siano elementi attivi e quindi non così affidabili, il guadagno di retroazione sarebbe affidabile in quanto può essere implementato utilizzando componenti passivi. Questa osservazione si è rivelata rivoluzionaria.
Potete approfondire questa scoperta nel meraviglioso libro di Gertner [2]. I Bell Labs erano in generale molto avanti rispetto ai loro tempi (un Picturephone?). È anche interessante vedere come istituzioni come i Bell Labs abbiano ispirato gli istituti di ricerca odierni [cap. 20, 2]. Per ulteriori approfondimenti storici e tecnici, vi consigliamo di ascoltare anche l'episodio 38 del podcast inControl [3].
Lo schema sopra riportato è probabilmente la manifestazione più semplice del feedback, normalmente il sistema non è una costante come A, ma un sistema dinamico in cui ciascuno dei parametri è in costante cambiamento (si pensi a un motore, a un robot e così via). Tuttavia, l'esempio coglie il nucleo di questo post: in qualche modo, reimmettiamo un errore nel sistema per ottenere un output desiderabile.
Generalizziamo quanto sopra e passiamo a un esempio leggermente più complesso. In genere, per progettare schemi di feedback, consideriamo alcuni errori che vorremmo che fosse 0, diciamo "err = in - out", il che significa che non vogliamo errori nel nostro sistema. Se, dopo un adeguato ridimensionamento, reimmettiamo questo valore nel sistema, lo chiameremmo controllo "proporzionale" (P) Il nostro segnale di controllo è proporzionale al segnale di errore. Supponiamo ora che nel sistema entri anche un disturbo costante, ma sconosciuto. Allora, in generale, per assicurarci che il nostro errore sia nuovamente 0, il nostro segnale di controllo deve includere anche un termine costante, per compensare il disturbo. Tuttavia, in tal caso, il segnale di controllo non può essere una funzione solo dell'errore, altrimenti l'errore non tornerebbe mai a 0. Per conciliare questo aspetto, il segnale di controllo viene scelto in modo che sia proporzionale all'integrale del segnale di errore. Con una progettazione adeguata, l'integrale dell'errore finirà per corrispondere al disturbo, mentre l'errore stesso svanirà con il passare del tempo. Questo è il nucleo dello schema di retroazione più importante e ampiamente utilizzato chiamato "controllo PID", introdotto nel 1922 da Minorsky (1). I lettori con conoscenze tecniche possono considerare non solo l'errore stesso (P) oo l'integrale (I), ma anche la sua derivata (D).
Questa digressione ci riporta alla mandria di mucche. Molti di voi (non io) pensano al latte quando pensano alle mucche; e parte della biologia che sta alla base della produzione del latte ha un forte legame con i concetti di feedback appena discussi. Nello specifico, i livelli di calcio nelle mucche sono strettamente regolati grazie agli ormoni che sembrano utilizzare la versione biologica di un regolatore PI (4). Intorno al momento del parto, la produzione di latte richiede che la mucca madre fornisca calcio, il che fa scendere i livelli a un livello pericolosamente basso, e viene attivato il meccanismo di feedback ormonale.
Se questo vi sembra familiare, è perché segue un processo simile al feedback mostrato nella figura ii. Questa osservazione è di per sé molto interessante e rappresenta uno dei tanti straordinari schemi di controllo presenti in natura, ma soprattutto, l'identificazione di questi schemi di feedback fisiologico aiuta a scoprire importanti fattori che causano malattie, aprendo la strada a rimedi, rimedi basati su principi.
Potete leggere ulteriori informazioni sulla scoperta del feedback negativo nei Bell Labs nel meraviglioso libro di Gertner (2).
Per ulteriori osservazioni storiche e tecniche sul feedback, potete anche ascoltare l'episodio 38 del podcast inControl (3).
Riferimenti:
(1) Hägglund, T., Guzman, J. L. Give us PID controllers and we can control the world. IFACPapersOnLine 58;(2024),n pp. 103-108. DOI: 10.1016/j.ifacol.2024.08.018
(2) Gertner, J. The idea factory Bell Labs and the Great Age of American Innovation. Penguin Books, 2013.
(3) https://www.incontrolpodcast.com/1632769/episodes/18193180-ep38-incontrol-guide-to-feedback
(4) El-Samad, H., Goff, J. P., Khammash, M. Calcium Homeostasis and Parturient Hypocalcemia: An Integral Feedback Perspective. J. Theor. Biol. 214. 2002,pp.17-29.DOI:10.1006/jtbi.2001.2422



