Via Automation - petit tour d'horizon du contrôle automatique: Commentaires


Au premier abord, il peut sembler étrange de parler de contrôle automatique pendant une randonnée. La plupart d'entre nous n'apprécions-nous pas justement les randonnées pour nous immerger dans la nature et nous éloigner de l'industrialisation ? Comme nous l'avons déjà vu dans l'article précédent, nos outils sont étroitement liés à des stratégies efficaces de préservation de notre environnement, mais peut-être plus important et plus direct encore, considérer les contrôles et l'optimisation comme relevant uniquement de l'industrie nous prive d'une grande partie du plaisir et de l'utilité de nos activités.
En fin de compte, une personne travaillant dans le domaine du contrôle automatique cherche à comprendre les systèmes dynamiques et leur fonctionnement à un niveau fondamental. Ces systèmes peuvent être industriels, mais ce n'est pas nécessairement le cas. Nous cherchons en particulier à comprendre comment modifier le comportement dynamique (c'est-à-dire les schémas de comportement qui se produisent au sein d'un système au fil du temps), par exemple pour améliorer la précision d'une imprimante 3D, stabiliser en douceur les avions lors des virages, chauffer efficacement les machines à café et même comprendre la régulation du calcium chez les vaches. Croyez-le ou non, tous les exemples susmentionnés (y compris les vaches) peuvent être étudiés à l'aide d'outils plus ou moins identiques, le thème général étant ici la rétroaction.

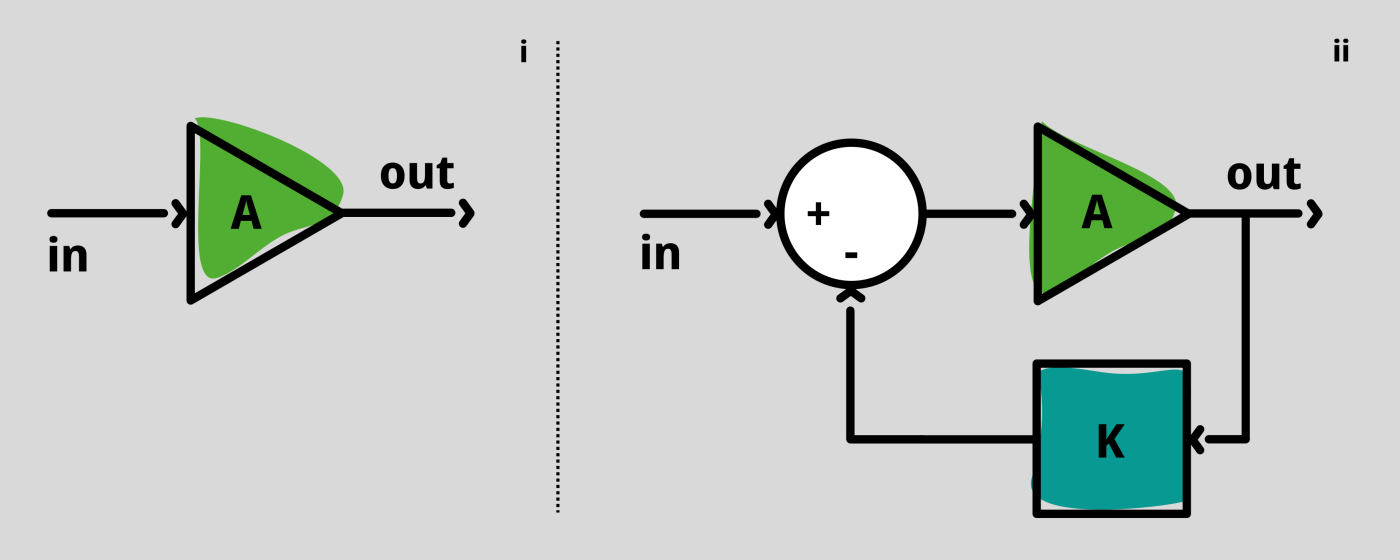
Au début des années 1900, le concept de rétroaction a fait son apparition dans le domaine des télécommunications. Plus précisément, sur de longues distances, les signaux devenaient si faibles que des informations étaient perdues, ce qui obligeait les ingénieurs à trouver un moyen de les amplifier. De manière schématique et simplifiée, si nous avons une entrée (in), la sortie (out) serait out = A*in, voir fig. 1(i). Nous devons donc nous assurer que l'amplification (A) est suffisamment importante. Cependant, les amplificateurs de l'époque n'étaient pas très fiables, il n'était donc pas possible de fixer une valeur fixe pour A. C'est comme si vous essayiez de conduire alors que votre pédale d'accélérateur ne fonctionnait que par intermittence.
Pour résoudre ce problème, Harold Black, ingénieur chez Bell Labs, a imaginé le concept de rétroaction. Plus précisément, la rétroaction négative. Pour une représentation schématique, voir Fig. 1(ii). Dans ce cas, la sortie suit l'équation out=A/(1+A*K) *in. Par conséquent, si A est suffisamment grand, qu'il soit fiable ou non, nous obtenons que out est approximativement égal à 1/K * in.
Remarque : dans ce cas, vous pouvez considérer « in » davantage comme un « signal de référence ». Ces schémas ont été mis en œuvre à l'aide de composants analogiques et leur intérêt réside dans le fait que, bien que les amplificateurs soient des éléments actifs et donc peu fiables, le gain de rétroaction serait fiable car il peut être mis en œuvre à l'aide de composants passifs. Cette observation s'est avérée révolutionnaire.
Vous pouvez en savoir plus sur cette découverte dans le merveilleux ouvrage de Gertner [2]. Bell Labs était en général très en avance sur son temps (un Picturephone ?). Il est également intéressant de voir comment des institutions telles que Bell Labs ont inspiré les instituts de recherche actuels [ch. 20, 2]. Pour plus d'informations d'ordre historique et technique, vous pouvez également écouter l'épisode 38 du podcast inControl [3].
Le schéma ci-dessus est sans doute la manifestation la plus simple de la rétroaction. Normalement, le système n'est pas une constante comme A, mais un système dynamique où chacun des paramètres change constamment (pensez à un moteur, un robot, etc.). Cependant, l'exemple capture l'essence de cet article : sous une forme ou une autre, nous renvoyons une erreur dans le système afin d'obtenir le résultat souhaité.
Généralisons ce qui précède et passons à un exemple un peu plus complexe. En général, pour concevoir des schémas de rétroaction, nous prenons en compte certaines erreurs que nous souhaiterions être égal à 0, disons « err = in - out », ce qui signifie que nous ne voulons aucune erreur dans notre système. Si, après une mise à l'échelle appropriée, nous réinjectons cela dans le système, nous appellerions cela un contrôle « proportionnel » (P). Notre signal de contrôle est proportionnel au signal d'erreur. Supposons maintenant qu'une perturbation constante, mais inconnue, entre dans le système. Alors, en général, pour nous assurer que notre erreur est à nouveau égale à 0, notre signal de contrôle doit également inclure un terme constant afin de compenser la perturbation. Cependant, dans ce cas, le signal de commande ne peut pas être une fonction de l'erreur seule, sinon l'erreur ne serait jamais égale à 0. Pour concilier cela, le signal de commande est choisi pour être proportionnel à l'intégrale du signal d'erreur. Grâce à une conception appropriée, l'intégrale de l'erreur finira par correspondre à la perturbation, tandis que l'erreur elle-même disparaîtra avec le temps. C'est le principe fondamental du système de rétroaction le plus important et le plus largement utilisé, appelé « contrôle PID », introduit en 1922 par Minorsky (1). Pour les lecteurs techniques, vous pouvez prendre en compte non seulement l'erreur elle-même (P) ou l'intégrale (I), mais aussi sa dérivée (D).
Ce détour nous ramène au troupeau de vaches. Beaucoup d'entre vous (pas moi) pensent au lait lorsqu'ils pensent aux vaches ; et une partie de la biologie qui sous-tend la production de lait est étroitement liée aux concepts de rétroaction que nous venons d'évoquer. Plus précisément, les niveaux de calcium chez les vaches sont étroitement régulés grâce à des hormones qui semblent utiliser la version biologique d'un contrôleur PI (4). Au moment de la mise bas, la production de lait nécessite que la vache mère fournisse du calcium, ce qui fait chuter ses propres niveaux à un niveau dangereusement bas, et le mécanisme de rétroaction hormonale est activé.
Si cela vous semble familier, c'est parce que ce processus est similaire à la rétroaction illustrée dans la figure ii. Cette observation est très intéressante en soi et constitue l'un des nombreux mécanismes de contrôle remarquables que l'on trouve dans la nature, mais surtout, l'identification de ces mécanismes de rétroaction physiologique aide à découvrir des facteurs importants qui causent des maladies, ouvrant la voie à des remèdes, des remèdes fondés sur des principes.
Vous pouvez en savoir plus sur la découverte de la rétroaction négative dans les laboratoires Bell dans le merveilleux livre de Gertner (2).
Pour plus de remarques historiques et techniques sur la rétroaction, vous pouvez également écouter l'épisode 38 du podcast inControl (3).
Références:
(1) Hägglund, T., Guzman, J. L. Give us PID controllers and we can control the world. IFACPapersOnLine 58;(2024),n pp. 103-108. DOI: 10.1016/j.ifacol.2024.08.018
(2) Gertner, J. The idea factory Bell Labs and the Great Age of American Innovation. Penguin Books, 2013.
(3) https://www.incontrolpodcast.com/1632769/episodes/18193180-ep38-incontrol-guide-to-feedback
(4) El-Samad, H., Goff, J. P., Khammash, M. Calcium Homeostasis and Parturient Hypocalcemia: An Integral Feedback Perspective. J. Theor. Biol. 214. 2002,pp.17-29.DOI:10.1006/jtbi.2001.2422



