Via Automation - petit tour d'horizon du contrôle automatique: Contrôle optimal


Nous avons précédemment abordé les bases de la régulation, c'est-à-dire le fait de conduire un système vers un point de référence et de le maintenir à cet endroit (dans notre exemple précédent, la façon dont une vache maintient son taux de calcium stable après avoir mis bas). C'est le principe fondamental du contrôle automatique. En effet, passer de A à B peut être compris comme le fait de conduire un système vers un nouveau point de référence (c'est-à-dire décider comment vous voulez que les choses soient, puis les maintenir ainsi). Cependant, ceci n’est pas l'objet principal de cet article.
Pour illustrer notre propos, commençons par une petite expérience. Prenez une corde et attachez-y un objet suffisamment lourd, ou remplissez un sac fourre-tout (totebag). Maintenant, en ne tenant que le haut de la corde ou du sac, déplacez l'objet lourd vers n'importe quel mur autour de vous. Qu'avez-vous observé ? Votre objet a-t-il heurté le mur ? Ou peut-être avez-vous été très prudent et avez-vous mis beaucoup de temps avant d'atteindre le mur ? Si vous avez déjà pris une télécabine, vous avez peut-être remarqué qu'en plus d'un trajet en douceur, vous pouvez ressentir des oscillations importantes ou un mouvement apparemment extrêmement lent.
Le fait de passer de A à B (dans notre cas, de la vallée à la montagne) est rarement la seule chose qui nous importe. Nous pouvons également nous soucier de la sécurité, du confort, de l'efficacité, etc. De plus, nous devons généralement trouver un compromis, car il existe rarement une solution « idéale » unique. Si nous reprenons l'exemple de la télécabine, il est préférable de voyager lentement si nous voulons éviter le mal des transports, mais nous souhaitons également arriver à destination assez rapidement et de manière économe en énergie. Comment choisir alors la stratégie appropriée ?
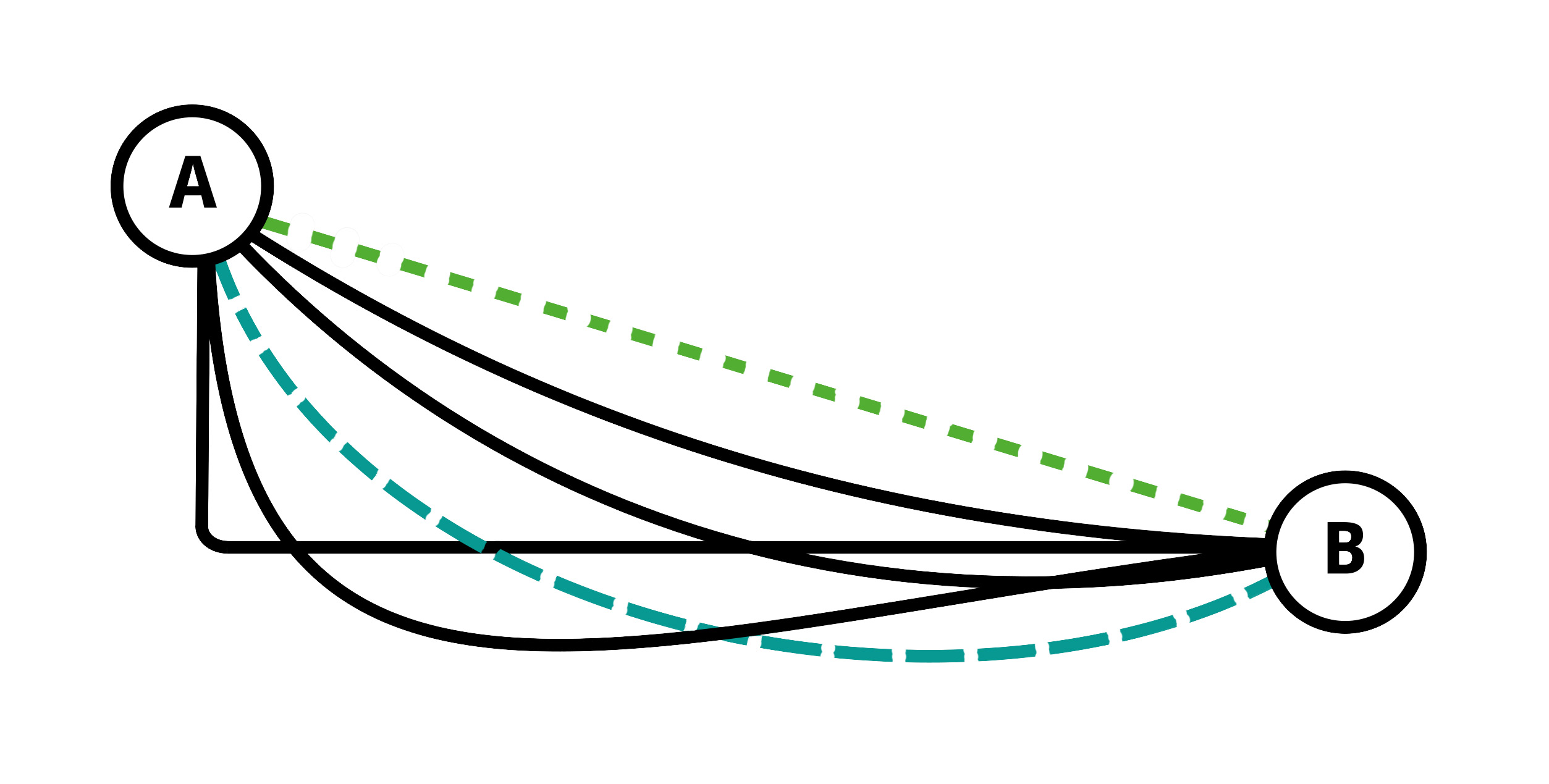
L'intégration de ce type de compromis dans le contrôle automatique nous amène dans le sous-domaine de ce que l'on appelle le contrôle optimal. Le contrôle optimal est apparu en physique, car les systèmes étudiés en physique peuvent être considérés, dans un sens abstrait, comme suivant des trajectoires optimales. Nous n'entrerons pas dans les détails ici, mais si vous avez déjà visité Technorama et vu l'exposition sur la balle roulante, il s'agit d'une visualisation du « problème de la brachystochrone », posé par le mathématicien suisse Johann Bernoulli à la fin du XVIIe siècle. Nous avons une balle au point A et nous voulons trouver la courbe qui lui permettrait de rouler jusqu'au point B en un minimum de temps. On pourrait supposer que la ligne droite représentée en vert (Tirets courts) ci-dessous serait la plus rapide, mais il s'agit d'un problème de contrôle géométrique optimal (1). La solution au problème de Bernoulli est différente et ne semble pas logique, comme le montre l'illustration ci-dessous avec la ligne verte-bleue (Tirets longs).
Ce sont des mathématiques fascinants, mais considérons une question qui met en évidence non seulement l'optimalité, mais aussi certains compromis ; une question qui pourrait être posée lors d'un repas de Noël : « Pourquoi ne roulons-nous pas à 200 km/h partout ? » La sécurité est évidemment un facteur très important, mais ce n'est pas tout. Par exemple, la résistance de l'air augmente de manière quadratique avec la vitesse, car la puissance est proportionnelle à la force multipliée par la vitesse. Il faut donc 8 fois plus de puissance pour vaincre la résistance de l'air lorsque l'on double la vitesse ! Cette raison à elle-seule coûte beaucoup d'énergie supplémentaire, et ceci sans même tenir compte d'autres notions de dégradation à grande vitesse. Par conséquent, si l'on veut aller le plus loin possible avec un seul réservoir, il est conseillé de ne pas rouler aussi vite que possible. En effet, il existe généralement une plage optimale de vitesses de croisière (2). La manière de déterminer cette plage relève de l'optimisation, comme l'ont déjà expliqué plusieurs articles du NCCR Automation (3).
Revenons maintenant à notre télécabine. Lorsque nous nous dirigeons vers l'une des tours intermédiaires ou vers la station d’arrivée, nous ne pouvons pas nous fier uniquement au contrôle de position de la cabine. Sinon, nous risquerions d'approcher la tour à pleine vitesse, de nous arrêter brusquement et de commencer à osciller fortement. Adieu le début de journée relaxant ! Nous devons plutôt trouver un compromis entre le contrôle de position et le contrôle angulaire, tout en gardant un œil sur le temps. Nous ne pouvons pas avancer trop lentement. Un contrôle optimal nous permet de gérer cela de manière rationnelle. En d'autres termes, nous cherchons à trouver un contrôleur qui nous permette non seulement de nous déplacer de A à B, mais aussi de nous déplacer de A à B de manière optimale.
Vous pourriez modéliser la cabine comme un chariot à l'envers sur des rails. Cependant, notre modèle ignorerait alors complètement le balancement de la cabine. Pour inclure l'effet dominant du balancement, on peut étudier la cabine à l'aide d'un système de référence classique en contrôle automatique, appelé « pendule sur un chariot » (4). Ce système est relativement simple, mais il permet d'étudier de nombreux principes fondamentaux de contrôle. Pour nous, la caractéristique importante est que le balancement de la cabine corresponde naturellement au balancement du pendule.
Ensuite, à l'aide de ce modèle, on peut chercher à trouver un contrôleur tel que la cabine (le pendule suspendu à un chariot) arrive à une tour avec une vitesse angulaire nulle et ne tourne pas, dans un temps de trajet minimal (5). Un tel contrôleur amortit les oscillations excessives, mais vous amène tout de même à destination dans un délai raisonnable. Il est intéressant de noter que cette question revêt une grande importance dans toutes sortes d'industrie, car les grues sur un chantier de construction se comportent de manière similaire.
Dans cet article, nous avons supposé que la corde était rigide (2), ce qui facilite les calculs sous-jacents. Cependant, si l'on se réfère à notre précédent article sur la rétroaction, les entrées obtenues sont-elles valables lorsqu'elles sont mises en œuvre sur le système réel ? C'est une question légitime, d'autant plus que les entrées obtenues sont généralement discontinues. Dans ce blog, nous n'avons abordé que le contrôle optimal en « boucle ouverte », nom donné aux systèmes où nous ne prenons en compte que le temps, mais nous reviendrons sur la rétroaction lorsque nous aborderons le contrôle prédictif de modèle (MPC) dans un prochain article. Mais avant cela, prenons un café !

Références
(1) Pour plus d'informations historiques en rapport avec la situation actuelle, consultez l'article classique suivant de Sussmann et Willems https://ieeexplore.ieee.org/document/588098
(2) Afin de ne pas faire référence à des fabricants particuliers, nous renvoyons à Wikipédia pour plus de détails.
(3) Voir par exemple, What is gradient descent and why should I care? , Getting optimal, why convexity matters et "Il s'agit d'un débordement sans précédent" : Pourquoi les progrès de son domaine inquiètent Yurii Nesterov.
(4) Voir par exemple, https://ctms.engin.umich.edu/CTMS/index.php?example=InvertedPendulum§ion=SystemModeling
(5) Voir par exemple l'article suivant présenté lors d'une conférence par Ermidoro et ses collègues https://ieeexplore.ieee.org/document/6858939
(6) En général, la manière de modéliser ces systèmes est loin d'être évidente. On a généralement recours à des systèmes complexes de masse-ressort-amortisseur, la cabine elle-même se comportant comme un pendule. Voir par exemple l'article suivant de Brownjohn https://www.sciencedirect.com/science/article/pii/S0141029697001132



