Via Automation – ein kleiner Rundgang durch die Regelungstechnik: Optimale Regelung


Zuvor haben wir die Grundlagen der Regelung besprochen, d. h. ein System auf einen bestimmten Referenzpunkt zu steuern und dort zu halten (in unserem Beispiel, wie eine Kuh ihren Kalziumspiegel nach der Geburt stabil hält). Dies ist der Kern der Regelungstechnik. Tatsächlich kann die Bewegung von A nach B als das Regeln eines Systems auf einen neuen Referenzpunkt verstanden werden (d. h. zu entscheiden, wie man die Dinge haben möchte, und sie dann so zu halten). Das ist jedoch nicht der Kern dieses Beitrags.
Um unseren Standpunkt zu verdeutlichen, sollten wir mit einem kleinen Experiment beginnen. Nehmen Sie ein Schlüsselband und befestigen Sie etwas ausreichend Schweres daran oder füllen Sie alternativ eine Tragetasche. Halten Sie nun nur die Oberseite des Schlüsselbands oder der Tasche fest und bewegen Sie den schweren Gegenstand so zu einer beliebigen Wand in Ihrer Umgebung. Was haben Sie beobachtet? Ist Ihr Gegenstand gegen die Wand geprallt? Oder waren Sie vielleicht sehr vorsichtig und es hat eine ganze Weile gedauert, bis Sie die Wand erreicht haben? Wenn Sie schon einmal mit einer Gondel gefahren sind, haben Sie vielleicht bemerkt, dass Sie neben einer ruhigen Fahrt auch erhebliche Schwankungen oder scheinbar extrem langsame Bewegungen erleben können.
Der Punkt ist, dass es uns selten nur darum geht, von A nach B zu gelangen (in unserem Fall vom Tal auf den Berg). Möglicherweise legen wir auch Wert auf Sicherheit, Komfort, Effizienz und so weiter. Darüber hinaus müssen wir in der Regel einen Kompromiss finden, da es selten einen einheitlich „besten” Weg gibt. Wenn wir wieder an unsere Gondel denken, ist es zwar gut, langsam zu fahren, um Reisekrankheit zu vermeiden, aber wir möchten auch schnell genug und energieeffizient an unserem Ziel ankommen. Wie wählen wir also eine geeignete Strategie aus?
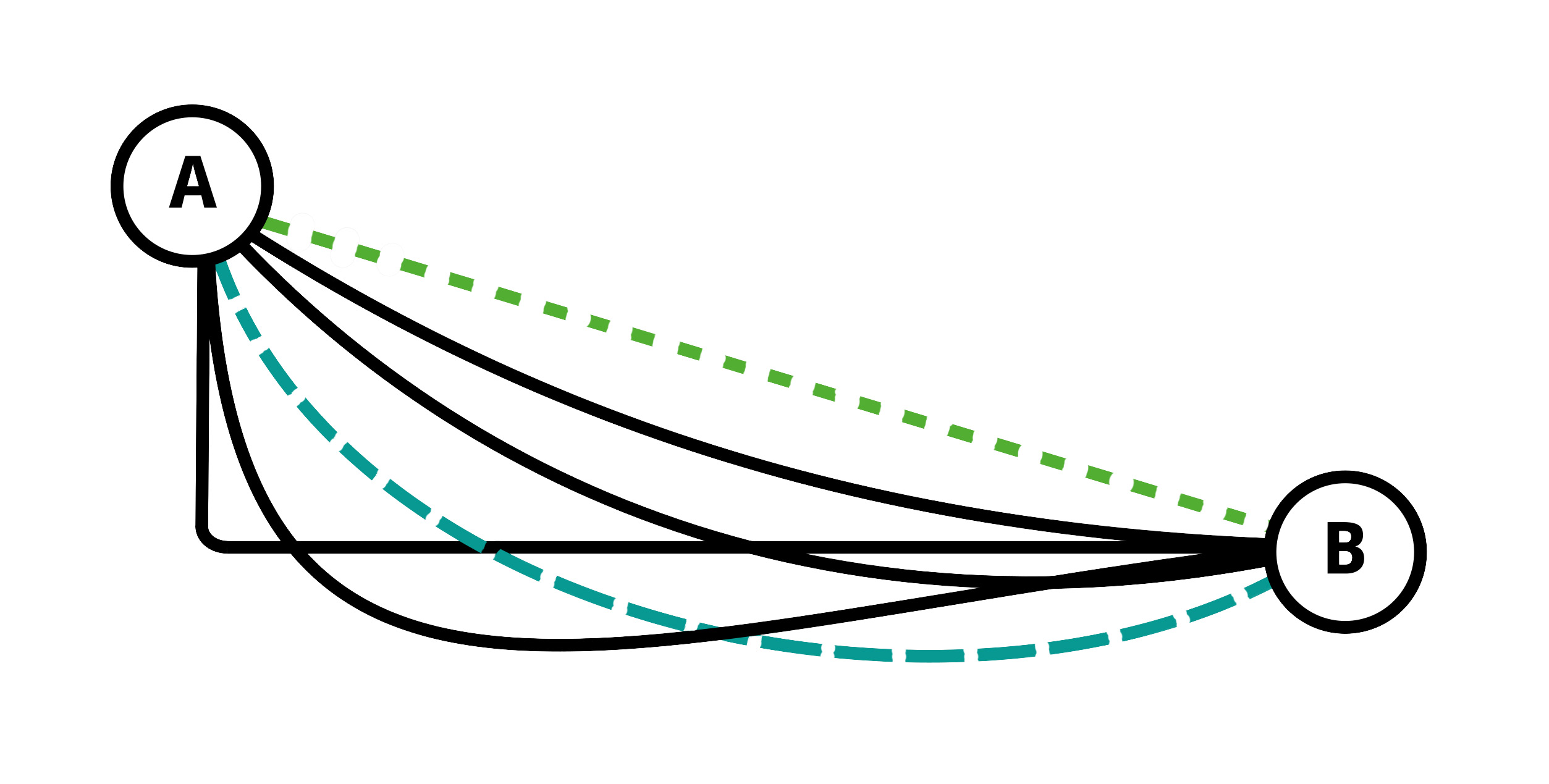
Die Integration dieser Art von Kompromissen in die Regelungstechnik führt uns in den Bereich der sogenannten optimalen Regelung. Die optimale Regelung entstand in der Physik, da physikalische Systeme in einem abstrakten Sinne als optimale Wege verstanden werden können . Wir werden hier nicht näher darauf eingehen, aber wenn Sie schon einmal das Technorama besucht und die Ausstellung mit den rollenden Kugeln gesehen haben, dann ist dies eine Visualisierung des „ -Brachystochrone-Problems”, , das der Schweizer Mathematiker Johann Bernoulli Ende des 17. Jahrhunderts aufgestellt hat. Wir haben eine Kugel am Punkt A und möchten die Kurve finden, auf der sie in kürzester Zeit zum Punkt B rollen kann. Man könnte annehmen, dass die unten in Grün (kurze Striche) dargestellte gerade Linie die schnellste wäre, jedoch handelt es sich hierbei um ein geometrisches optimales Regelungsproblem (1). Die Lösung für Bernoullis Problem ist anders und erscheint nicht logisch, wie unten in türkis (Lange Striche) dargestellt.
Das ist faszinierende Mathematik, aber betrachten wir einmal eine Frage, die nicht nur die Optimalität, sondern auch einige Kompromisse aufzeigt, eine Frage, die während eines Weihnachtsessens aufkommen könnte: „Warum fahren wir nicht überall 200 km/h?“ Natürlich ist Sicherheit ein sehr wichtiger Faktor, aber es gibt noch mehr zu bedenken. Beispielsweise wächst der Luftwiderstand quadratisch mit der Geschwindigkeit, da die Leistung proportional zur Kraft mal Geschwindigkeit ist. Wir benötigen also achtmal mehr Leistung, um den Luftwiderstand zu überwinden, wenn wir die Geschwindigkeit nur verdoppeln! Allein dies kostet viel zusätzliche Energie, und dabei haben wir noch nicht einmal andere Aspekte der Leistungsminderung bei hohen Geschwindigkeiten berücksichtigt. Wenn wir also mit einer Tankfüllung so weit wie möglich kommen wollen, lautet der Ratschlag, nicht so schnell wie möglich zu fahren. Tatsächlich gibt es in der Regel einen optimalen Bereich für Reisegeschwindigkeiten (2). Wie man diesen Bereich findet, ist eine Frage der Optimierung, wie bereits in mehreren NCCR Automation-Beiträgen behandelt wurde (3).
Kehren wir nun zu unserer Gondel zurück. Wenn wir uns auf einen der Zwischentürme oder die Endstation zubewegen, können wir uns nicht nur auf die Positionsregelung verlassen. Andernfalls würden wir uns wahrscheinlich mit voller Geschwindigkeit dem Turm nähern, abrupt anhalten und stark schwanken. So viel zum entspannten Start in den Tag. Stattdessen müssen wir zwischen Positionsregelung und Winkelregelung abwägen und gleichzeitig die Zeit im Auge behalten. Wir dürfen uns nicht zu langsam bewegen. Eine optimale Regelung ermöglicht es uns, dies auf prinzipielle Weise zu handhaben.
Anders ausgedrückt: Wir versuchen, eine Regelung zu finden, mit der wir uns nicht nur von A nach B bewegen, sondern uns optimal von A nach B bewegen.
Nun könnte man die Gondel als einen Wagen auf Schienen modellieren. Allerdings würde unser Modell dann das Schwingen der Gondel völlig ausser Acht lassen. Um den dominanten Schwingungseffekt einzubeziehen, kann man die Gondel anhand eines klassischen Benchmark-Systems in der automatischen Regelung untersuchen, dem sogenannten „Pendel auf einem Wagen“ (4). Dieses System ist relativ einfach, ermöglicht jedoch die Untersuchung vieler grundlegender Regelungsprinzipien. Für uns ist das wichtige Merkmal, dass das Schwingen der Gondel auf natürliche Weise an das Schwingen des Pendels angepasst ist.
Anhand dieses Modells kann man dann versuchen, einen Regler zu finden, mit dem die Gondel (das an einem Wagen hängende Pendel) mit einer Winkelgeschwindigkeit von Null am Turm ankommt und sich nicht dreht, und zwar in der kürzestmöglichen Zeit (5). Ein solcher Regler dämpft übermässige Schwingungen, bringt Sie aber dennoch in angemessener Zeit an Ihr Ziel. Es ist interessant, dass diese Frage in allen möglichen Branchen von grosser Bedeutung ist, da Kräne auf einer Baustelle sich ähnlich verhalten.
Im Obigen sind wir von der Annahme ausgegangen, dass das Seil starr ist (2), was die zugrunde liegenden Berechnungen vereinfacht. Wenn wir jedoch auf unseren vorherigen Beitrag zum Thema Rückkopplung zurückblicken, stellt sich die Frage, ob die resultierenden Eingaben bei der Umsetzung im realen System überhaupt brauchbar sind. Eine berechtigte Frage, zumal die resultierenden Eingaben in der Regel diskontinuierlich sind. Wir werden jedoch auf die Rückkopplung zurückkommen, wenn wir in einem späteren Beitrag die modellprädiktive Regelung (MPC) behandeln. Aber zuerst: Wie wäre es mit einer Tasse Kaffee?

Referenzen
(1) Weitere historische Anmerkungen in Bezug auf die heutige Zeit finden Sie in der folgenden klassischen Abhandlung von Sussmann und Willems: https://ieeexplore.ieee.org/document/588098
(2) Um keine bestimmten Hersteller zu nennen, verweisen wir für weitere Details auf Wikipedia.
(3) Siehe beispielsweise, What is gradient descent and why should I care? , Getting optimal, why convexity matters und "Das ist eine noch nie dagewesene Überschwemmung": Warum der Fortschritt seines Fachgebiets Yurii Nesterov beunruhigt
(4) Siehe z.B. https://ctms.engin.umich.edu/CTMS/index.php?example=InvertedPendulum§ion=SystemModeling
(5) Siehe beispielsweise den folgenden Konferenzbeitrag von Ermidoro und Kollegen https://ieeexplore.ieee.org/document/6858939
(6) Im Allgemeinen ist die Modellierung dieser Systeme alles andere als offensichtlich. In der Regel greift man auf komplexe Masse-Feder-Dämpfer-Systeme zurück, wobei sich die Gondel selbst wie ein Pendel verhält. Siehe beispielsweise den folgenden Artikel von Brownjohn https://www.sciencedirect.com/science/article/pii/S0141029697001132



