Ramener les fusées au sol en toute sécurité (Swiss Robotics Days)
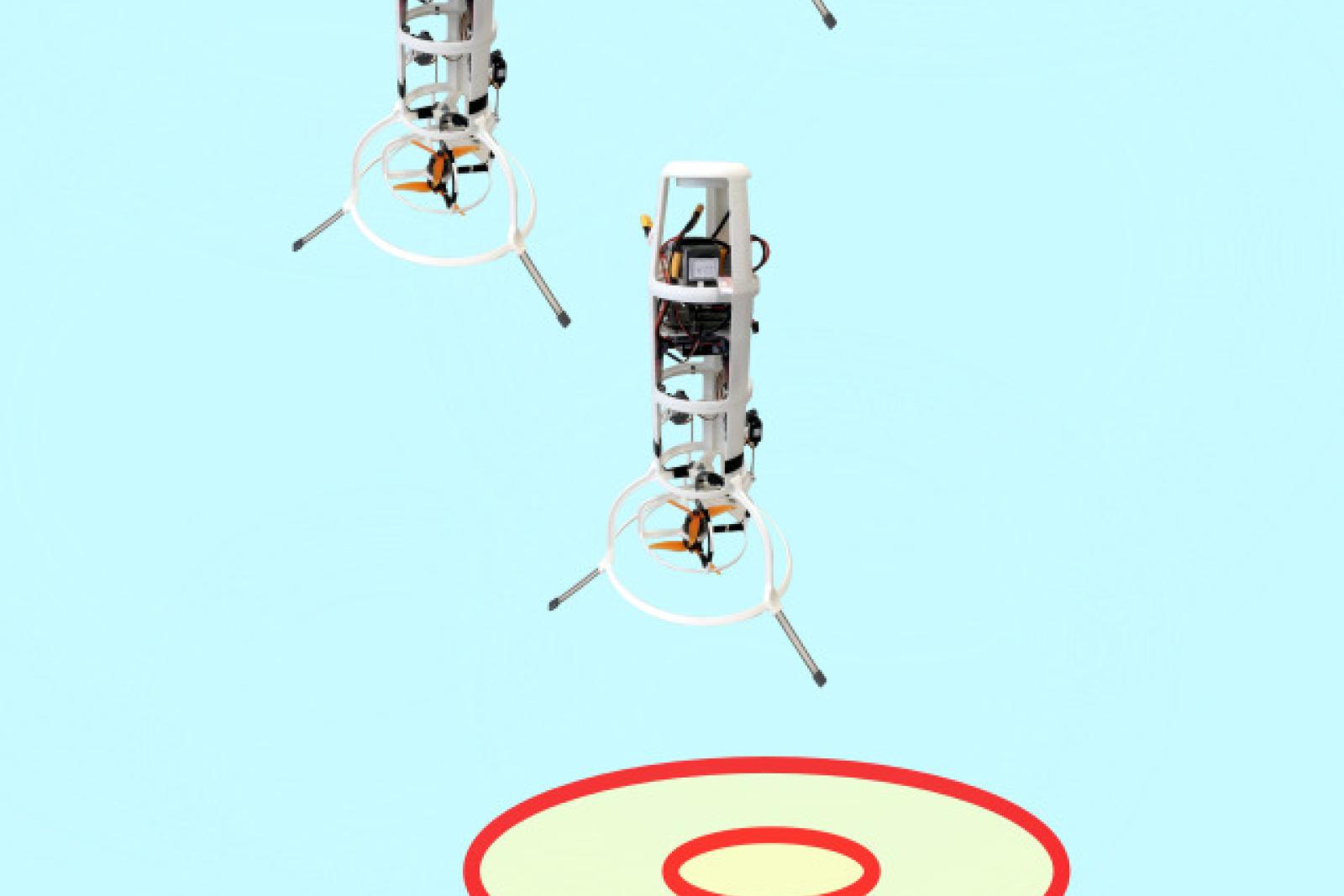
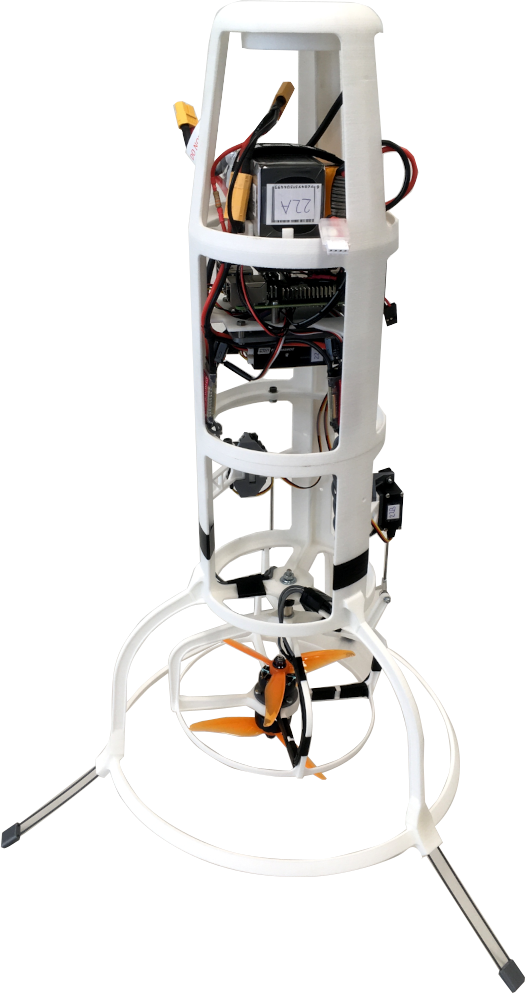
C'est exactement à ce genre de questions que les chercheurs de l'équipe Rocket Team de l'EPFL tentent de répondre avec leurs plateformes d'essai. L'équipe utilise un contrôleur prédictif de modèle (Model Predictive Control en français, MPC) dynamique et y branche ses algorithmes de contrôle, de navigation et de guidage pour permettre au robot de suivre la meilleure trajectoire vers le point où il veut atterir. En utilisant le contrôle prédictif couplé à des données du monde réel, il est possible d'estimer la position et la trajectoire du robot et donc d'optimiser les instructions de contrôle.
Grâce à ce contrôle mis à jour en permanence, il est possible pour le robot de s'adapter aux besoins actuels pendant le vol, ce qui signifie qu'il peut soit utiliser le moins de carburant possible, réduisant ainsi l'impact environnemental, soit, à l'approche d'un orage, abandonner les commandes précédentes et ce, le plus rapidement possible.
Jetez un coup d'œil à l'EPFL Rocket Team sur https://epflrocketteam.ch/ et à une vidéo sur le prototype TVC de la fusée sur YouTube.
Nous fournissons une plateforme de test peu coûteuse pour développer une nouvelle génération d'algorithmes de guidage, de navigation et de contrôle.