Bringing rockets safely back to the ground
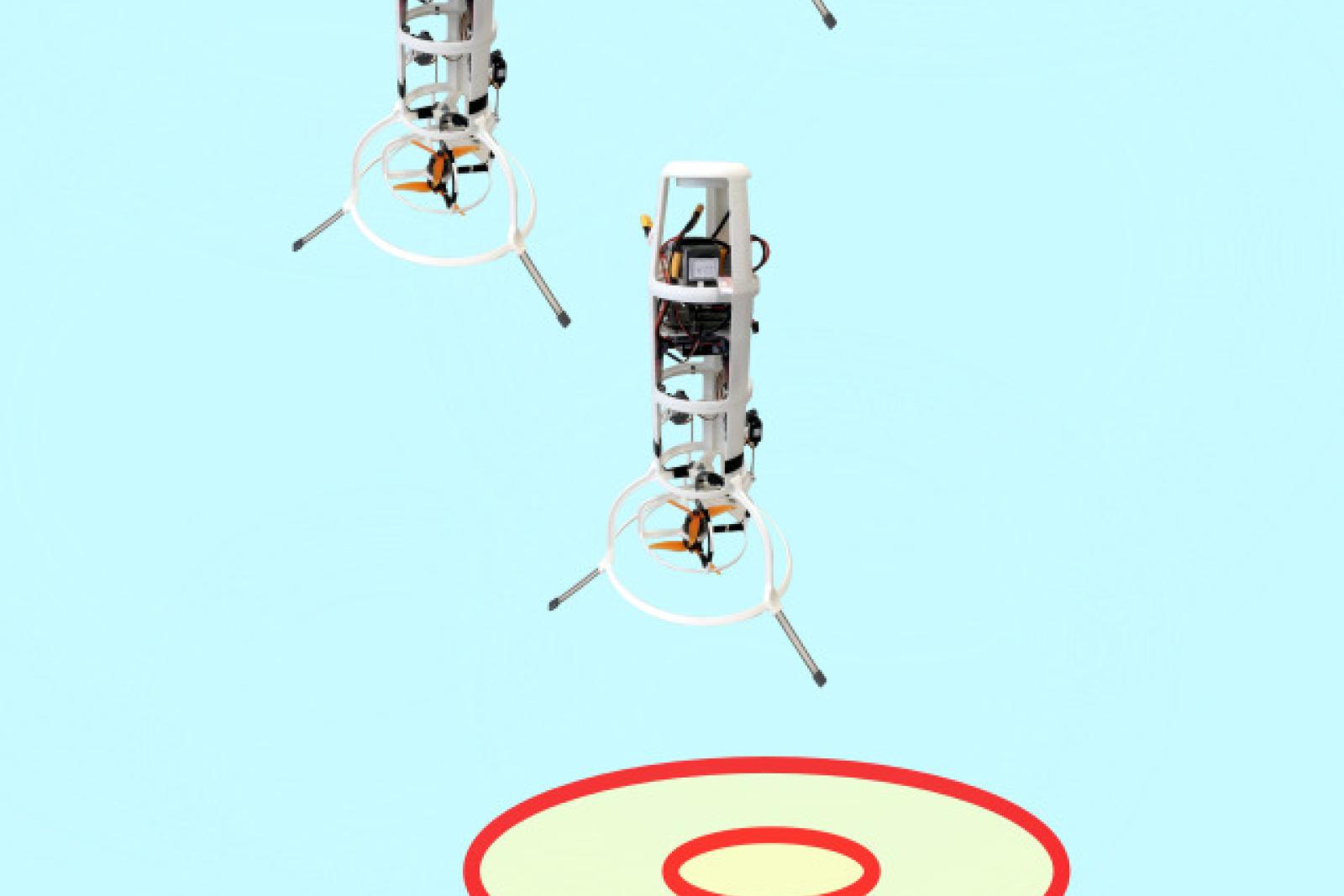
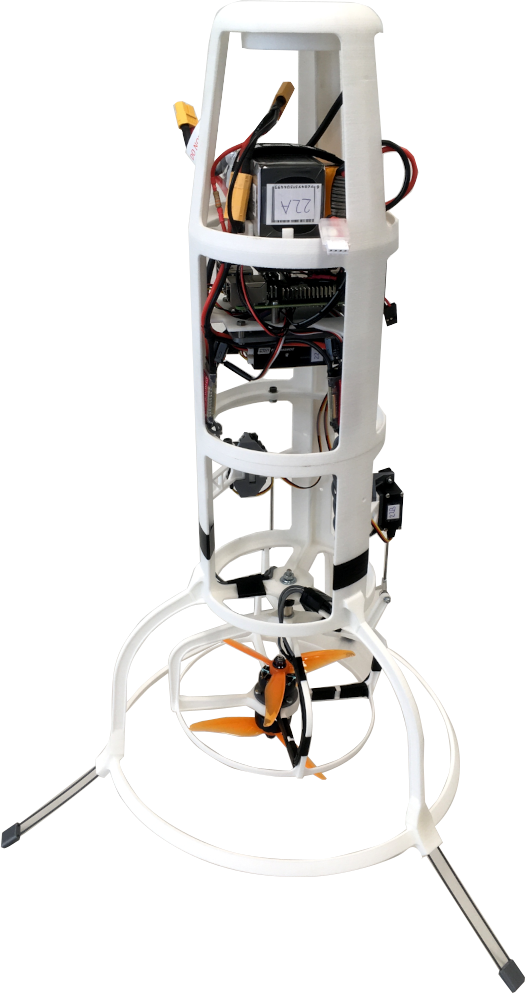
It is exactly these kinds of questions that the researchers of the EPFL Rocket Team are trying to answer with their test platforms. The team use a dynamic Model Predictive Controller (MPC) and plug in their control, navigation and guidance algorithms to enable to robot to follow the best trajectory towards its landing goal. By using predictive control coupled with real-world data, it is possible to estimate the position and trajectory of the robot and to therefore optimise the control instructions.
By having this continuously updating control, it is possible for the robot to adapt to current needs during flight; meaning that it can either use the least fuel possible, thus reducing the environmental impact, or when a storm approaches, the robot can abandon previous commands and land as quickly as possible.
Have a look at the EPFL Rocket Team at https://epflrocketteam.ch/ and a video on the TVC test rocket on YouTube.
We provide an inexpensive test platform to develop a new generation of guidance, navigation and control algorithms.