Emilio Frazzoli

Emilio Frazzoli is a Professor of Aeronautics and Astronautics with the Laboratory for Information and Decision Systems, and the Operations Research Center at the Massachusetts Institute of Technology. He received a Laurea degree in Aerospace Engineering from the University of Rome, “Sapienza” , Italy, in 1994, and a Ph. D. degree from the Department of Aeronautics and Astronautics of the Massachusetts Institute of Technology, in 2001. Before returning to MIT in 2006, he held faculty positions at the University of Illinois, Urbana-Champaign, and at the University of California, Los Angeles. He is currently the Director of the Transportation@MIT initiative, and the Lead Principal Investigator of the Future Urban Mobility IRG of the Singapore-MIT Alliance for Research and Technology (SMART). He was the recipient of the IEEE George S. Axelby award in 2015, and a NSF CAREER award in 2002. He is an Associate Fellow of the American Institute of Aeronautics and Astronautics and a Senior Member of the Institute for Electrical and Electronics Engineers.
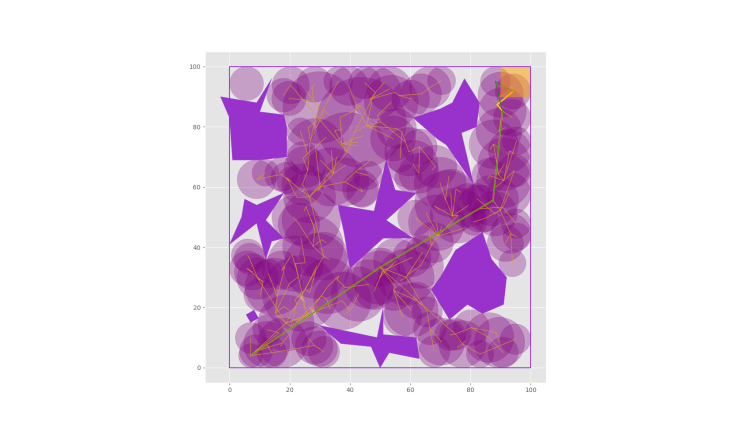
Dr. Frazzoli's current research interests focus primarily on autonomous vehicles, mobile robotics, and transportation systems, and in general lie in the area of planning and control for mobile cyber-physical systems.