Qu'est-ce que le MPC exactement ?



Les voitures sans conducteur, qui semblaient être un rêve futuriste il y a 50 ans, circulent désormais sur nos routes et font la une de l'actualité. Dans le domaine du transport ferroviaire, une révolution plus discrète est en cours. Étant donné que les trains circulent sur des voies fixes et n'ont pas à se soucier des autres véhicules ou des piétons qui pourraient les gêner (espérons-le), le problème de l'automatisation peut sembler beaucoup plus simple à résoudre. En effet, plusieurs systèmes ferroviaires sans conducteur sont déjà en service. La plupart d'entre eux sont des métros de transport de passagers, bien que le plus long système ferroviaire sans conducteur au monde soit celui de Rio Tinto Iron Ore en Australie occidentale, avec un trajet ferroviaire de plus de 500 km. Avec l'importance croissante accordée à l'efficacité énergétique, la question relative aux systèmes ferroviaires sans conducteur est passée de « Comment faire ? » à « Comment bien faire ? ».
Il existe plusieurs manières de répondre à cette question, l’une d’elles étant le contrôle prédictif par modèle. Pour comprendre comment répondre à cette question à l'aide de cet outil, commençons par le début.
Les facteurs qui déterminent la vitesse d'un train à un point donné de la voie sont les suivants :
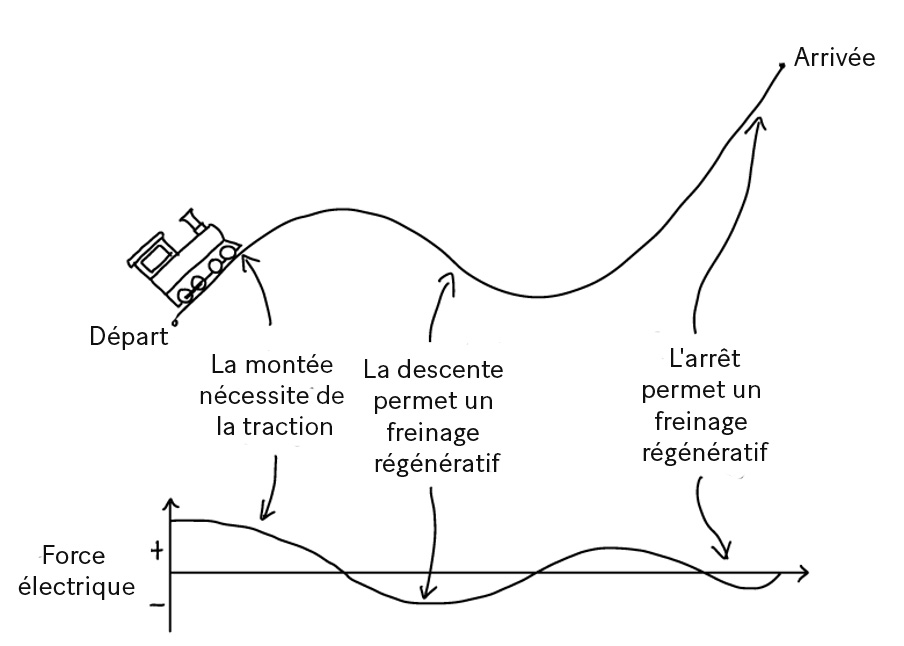
La force électrique appliquée au train. Il s'agit d'une force positive si le train accélère, et d'une force négative s'il freine. Le freinage par récupération ralentit le train en utilisant les moteurs comme générateurs et en renvoyant l'énergie récupérée vers le réseau.
La force de freinage pneumatique (produite par le freinage traditionnel utilisant la friction). Sur la plupart des trains modernes, celle-ci n'est utilisée qu'en cas d'urgence.
Les forces dues à la pente et à la courbure de la voie
La force de résistance au roulement
La masse du train
Parmi celles-ci, nous ne pouvons contrôler que les forces électriques et pneumatiques qui sont appliquées. Nous pouvons toutefois modéliser les autres forces (nous y reviendrons plus tard), ce qui nous permet de calculer les forces électriques nécessaires pour déplacer le train à une vitesse donnée. Mais quelle doit être cette vitesse ? Elle sera déterminée par les critères supplémentaires à prendre en compte :
L'énergie totale prélevée sur le réseau doit être minimisée
Les lois de la physique ne doivent pas être enfreintes
Les limites de vitesse doivent être respectées
Les temps de trajet doivent être respectés
Les limites physiques des commandes du train ne doivent pas être dépassées
La puissance maximale possible transmise aux roues ne doit pas être dépassée
Les forces et les critères se combinent pour former un ensemble d'équations qui doivent être résolues ensemble afin de déterminer la force électrique optimale pour le trajet. Dans les cas simples, il est possible de trouver une force électrique continue qui satisfait aux forces et aux critères ; la force électrique requise pour un trajet ferroviaire bidimensionnel idéal en montée pourrait ressembler à ceci :
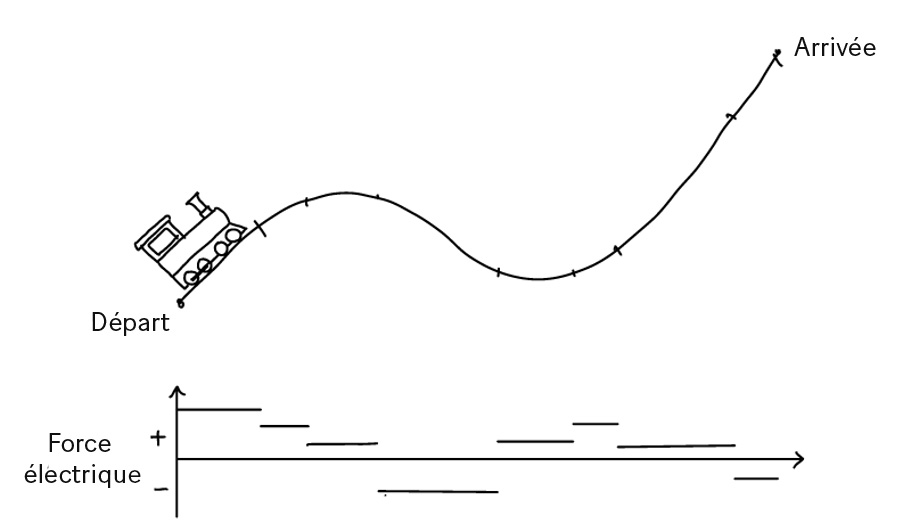
Malheureusement, les méthodes analytiques traditionnelles qui donnent une fonction continue pour la force électrique présentent des inconvénients : elles reposent sur des hypothèses simplificatrices qui ne sont pas valables dans la pratique et nécessitent des connaissances spécialisées pour adapter l'algorithme de résolution si la formulation du problème change. Une façon de surmonter ces problèmes consiste à utiliser des méthodes numériques. Dans ces méthodes, nous discrétisons d'abord le problème en divisant la voie en sections qui ont chacune une pente et une limite de vitesse constantes. Nous trouvons ensuite une solution qui présente une force électrique constante sur chaque section.
Cette solution fonctionnerait très bien si :
Le modèle du système était parfait. Cela signifie, par exemple, connaître exactement le poids du train.
Il n'y avait pas de perturbations, telles que le vent ou la pluie, modifiant les conditions de la voie.
Malheureusement, ces éléments ne peuvent généralement pas être connus avec suffisamment de précision ni prévision. Étant donné que l'accélération du train dépend de sa masse, si celle-ci n'est pas connue avec suffisamment de précision (par exemple, si le nombre de passagers à bord n'est pas connu), l'accélération peut être trop élevée (ce qui entraîne un dépassement de la limite de vitesse et une consommation d'énergie excessive) ou trop faible (ce qui allonge la durée du trajet).
C'est là que le contrôle prédictif peut être utile. Voici comment cela fonctionne : avant le départ du train, la force électrique optimale pour le trajet est calculée à partir des meilleures informations disponibles. Cependant, cette force électrique calculée n'est utilisée qu'au début du trajet. Après un court laps de temps, des capteurs recueillent des informations sur la position, la vitesse et l'accélération actuelles du train. Sur la base de ces informations, un nouveau trajet optimal est calculé pour la partie restante de la voie et une force révisée est appliquée. Ce processus consistant à obtenir des informations en temps réel, à recalculer le trajet optimal et à mettre à jour la force appliquée est répété régulièrement tout au long du trajet, ce qui permet d'adapter et d'optimiser le trajet à la volée :
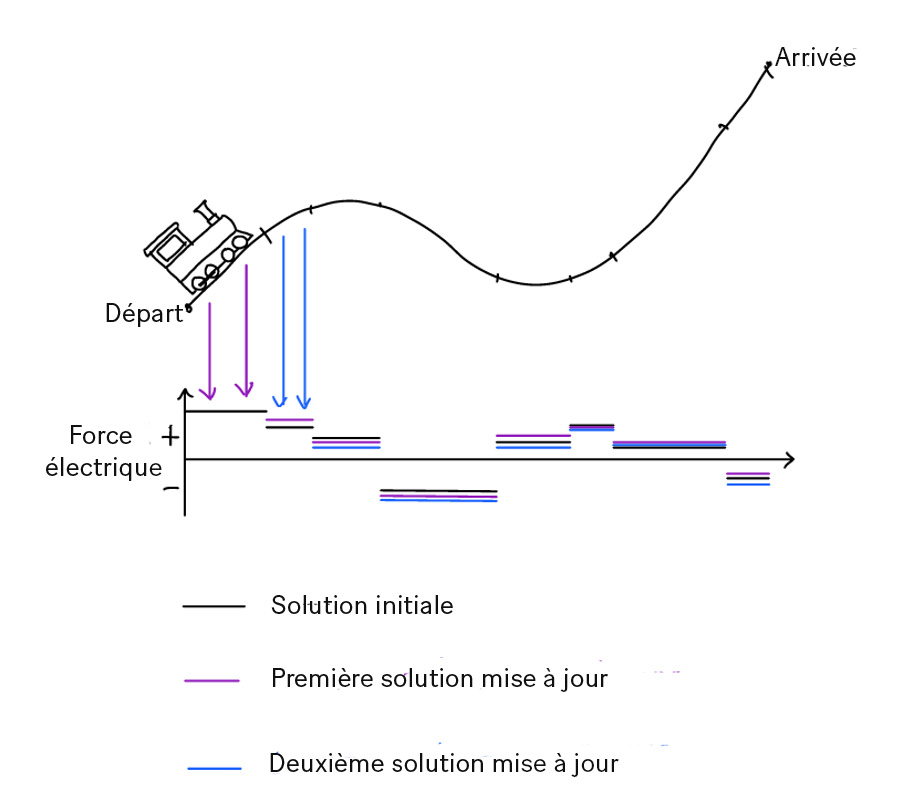
Il s'agit d'une technique potentiellement très puissante, car non seulement elle permet de minimiser la consommation d'énergie, mais elle permet également d'intégrer de manière transparente dans le plan de trajet les exigences imprévues en matière d'horaires ou les restrictions de vitesse temporaires.
Dans le cadre du projet SWITONIC financé par le NCCR Automation, Dimitris et Juxhino ont évalué son potentiel dans le monde réel. Ils ont déployé l'algorithme sur un train électrique moderne et l'ont comparé aux solutions industrielles courantes sur un trajet de 20 km. Sur la base de ces essais, la start-up nuorail a vu le jour afin de passer de la preuve de concept à la production.
Texte par Claire Blackman