Was ist MPC eigentlich?



Vor 50 Jahren schienen selbstfahrende Autos noch ein futuristischer Traum zu sein, heute fahren sie auf unseren Strassen und sorgen für Schlagzeilen in unseren Nachrichtenfeeds. Im Bereich des Schienenverkehrs findet eine stillere Revolution statt. Da Züge auf festen Gleisen fahren und (hoffentlich) nicht mit anderen Fahrzeugen oder Fussgängern zu kämpfen haben, scheint das Problem der Automatisierung viel einfacher zu lösen zu sein, und tatsächlich gibt es bereits einige fahrerlose Zugsysteme im Einsatz. Bei den meisten handelt es sich um U-Bahn-Systeme für Passagiere, wobei das längste fahrerlose Zugsystem der Welt das Rio Tinto Iron Ore System in Westaustralien ist, mit einer Strecke von über 500 km. Angesichts der derzeitigen verstärkten Fokussierung auf Energieeffizienz hat sich die Frage rund um fahrerlose Zugsysteme von „Wie machen wir das?“ zu „Wie machen wir das richtig?“ verschoben.
Um zu verstehen, wie diese Frage mit Hilfe der modellprädiktiven Regelung beantwortet werden kann, beginnen wir ganz am Anfang.
Die Faktoren, die bestimmen, wie schnell sich ein Zug an einem bestimmten Punkt der Strecke bewegt, sind:
- Die auf den Zug ausgeübte elektrische Kraft. Diese Kraft ist positiv, wenn der Zug beschleunigt, und negativ, wenn der Zug bremst. Durch regeneratives Bremsen wird der Zug verlangsamt, indem die Motoren als Generatoren genutzt werden und die zurückgewonnene Energie ins Netz zurückgespeist wird.
- Die pneumatische Bremskraft (erzeugt durch herkömmliches Bremsen mit Reibung). Bei den meisten modernen Zügen wird diese nur in Notfällen eingesetzt.
- Die Kräfte aufgrund der Steigung und Krümmung der Gleise
- Der Rollwiderstand
- Die Masse des Zuges
Von diesen können wir nur die elektrischen und pneumatischen Kräfte steuern, die ausgeübt werden. Wir können jedoch die übrigen Kräfte modellieren (mehr dazu später), wodurch wir die elektrischen Kräfte berechnen können, die erforderlich sind, um den Zug mit einer bestimmten Geschwindigkeit zu bewegen. Aber wie hoch sollte diese Geschwindigkeit sein? Dies wird durch zusätzliche Kriterien bestimmt, die berücksichtigt werden müssen:
- Die aus dem Netz entnommene Gesamtenergie sollte minimiert werden.
- Die Gesetze der Physik sollten nicht verletzt werden.
- Geschwindigkeitsbegrenzungen sollten eingehalten werden.
- Die Fahrzeiten sollten eingehalten werden.
- Die physikalischen Grenzen der Zugsteuerung sollten nicht überschritten werden.
- Die maximal mögliche Leistung an den Rädern sollte nicht überschritten werden
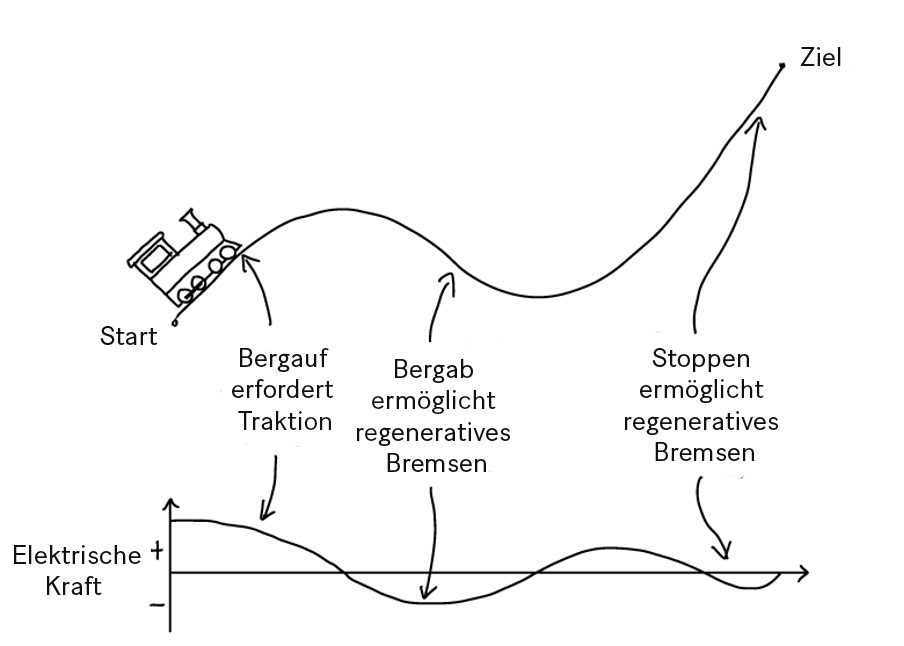
Die Kräfte und Kriterien ergeben zusammen eine Reihe von Gleichungen, die gemeinsam gelöst werden müssen, um die optimale elektrische Kraft für die Fahrt zu ermitteln. In einfachen Fällen ist es möglich, eine kontinuierliche elektrische Kraft zu finden, die die Kräfte und Kriterien erfüllt. Die erforderliche elektrische Kraft für eine idealisierte zweidimensionale Zugfahrt bergauf könnte etwa wie folgt aussehen:
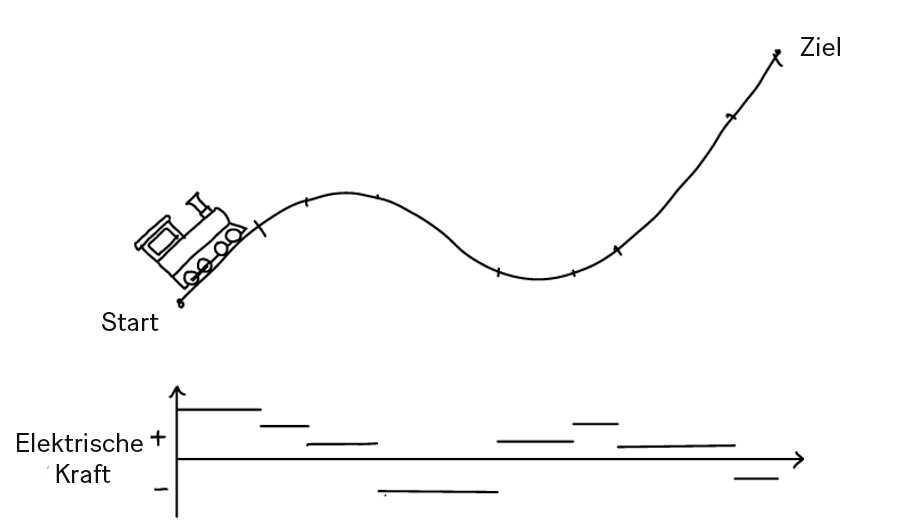
Leider haben traditionelle analytische Methoden, die eine stetige Funktion für die elektrische Kraft liefern, Nachteile: Sie basieren auf vereinfachenden Annahmen, die in der Praxis nicht zutreffen, und erfordern Fachwissen, um den Lösungsalgorithmus anzupassen, wenn sich die Problemformulierung ändert. Eine Möglichkeit, diese Probleme zu überwinden, ist die Verwendung numerischer Methoden. Bei diesen Methoden diskretisieren wir zunächst das Problem, indem wir die Strecke in Abschnitte mit jeweils konstanter Steigung und Geschwindigkeitsbegrenzung unterteilen. Anschliessend suchen wir eine Lösung, bei der in jedem Abschnitt eine konstante elektrische Kraft wirkt.
Diese Lösung würde sehr gut funktionieren, wenn:
- Das Modell des Systems perfekt wäre. Das bedeutet beispielsweise, dass man genau weiss, wie viel der Zug wiegt.
- Es keine Störungen wie Wind oder Regen gibt, welche die Gleisbedingungen verändern.
Leider lassen sich diese Dinge in der Regel nicht genau genug bestimmen oder vorhersagen. Da die Beschleunigung des Zuges von seiner Masse abhängt, kann die Beschleunigung zu hoch sein (was dazu führt, dass der Zug die Geschwindigkeitsbegrenzung überschreitet und zu viel Energie verbraucht) oder zu niedrig (was zu einer zu längeren Fahrzeit führt), wenn die Masse nicht genau genug bekannt ist (z. B. weil nicht bekannt ist, wie viele Fahrgäste sich im Zug befinden).
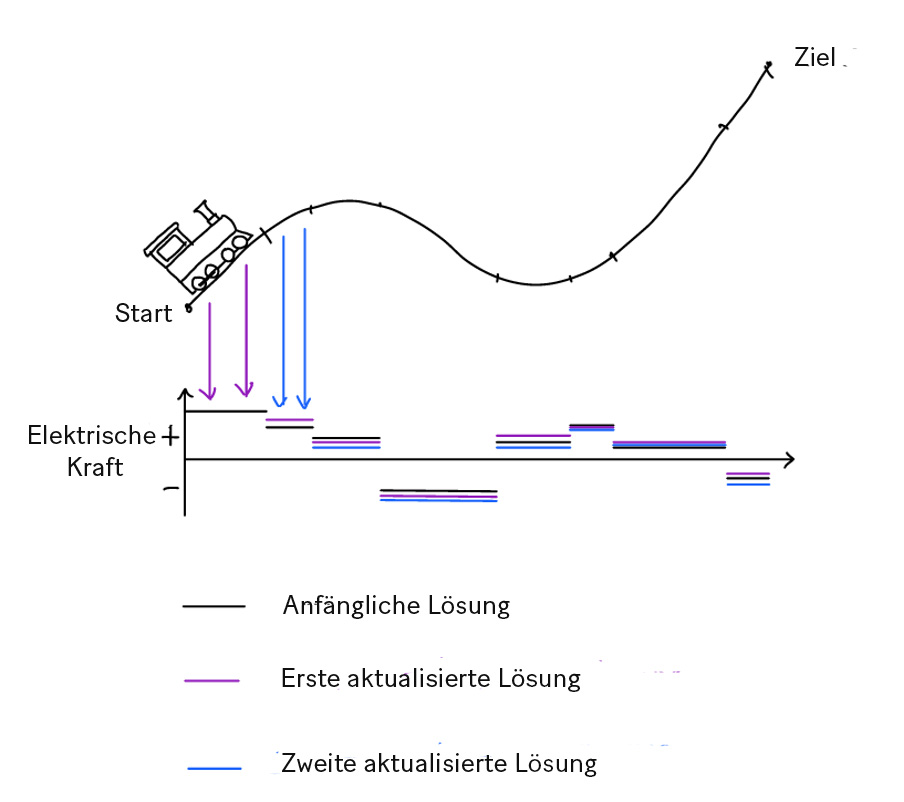
Hier kann die modellprädiktive Regelung helfen. So funktioniert sie: Bevor der Zug losfährt, wird anhand der besten verfügbaren Informationen die optimale elektrische Kraft für die Fahrt berechnet. Diese berechnete elektrische Kraft wird jedoch nur zu Beginn der Fahrt verwendet. Nach kurzer Zeit erfassen Sensoren Informationen über die aktuelle Position, Geschwindigkeit und Beschleunigung des Zuges. Auf der Grundlage dieser Informationen wird eine neue optimale Kraft für den verbleibenden Teil der Strecke berechnet und angewendet. Dieser Prozess der Erfassung von Echtzeitinformationen, der Neuberechnung und Anwendung der neuen optimalen Kraft wird während der gesamten Fahrt regelmässig wiederholt, sodass die Fahrt spontan angepasst und optimiert werden kann:
Dies ist eine potenziell äusserst starker Ansatz, da nicht nur der Energieverbrauch minimiert werden kann, sondern auch unerwartete Fahrplanänderungen oder vorübergehende Geschwindigkeitsbegrenzungen nahtlos in den Fahrplan integriert werden können.
Im vom NCCR Automation finanzierten Projekt SWITONIC haben Dimitris und Juxhino das Potenzial dieser Technik in der Praxis evaluiert. Sie setzten den Algorithmus in einem modernen Elektrozug ein und verglichen ihn auf einer 20 km langen Strecke mit gängigen Branchenlösungen. Auf der Grundlage dieser Versuche entstand nuorail, um das Konzept vom funktionierenden Prototypen in ein marktfähiges Produkt zu überführen.
Text verfasst von Claire Blackman



